Der VARIO-Airwolf, den Thomas Knoll derzeit baut, basiert auf der e-Power Skyfox-Mechanik von VARIO. Diese Mechanik ist zwar nicht die neueste, hat sich aber in vielen Modellen bewährt. Was es beim Aufbau zu beachten gilt, berichtet Thomas in seinem Beitrag. Außerdem hat er noch einige Tipps zum Zusammenbau parat.
Für den VARIO-Airwolf im Maßstab 1:8 habe ich mich für die e-power Mechanik (Bestell-Nummer 1002/15; 483,20 Euro) entschieden; diese Mechanik wird auch von VARIO für dieses Modell vorgeschlagen. Der Bausatz der Mechanik enthält die Mechanikseitenteile, das Hauptgetriebe, die Freilaufglocke mit Innenzahnrad, die Taumelscheibe sowie den Heckrotor und die Heckrotorblätter.
Zu diesem Bausatz muss noch die zu dem Modell passende Hauptrotorwelle, der Hauptrotorkopf und der Taumelscheibenmitnehmer bestellt werden. In diesem Fall wurde noch das Set für eine mit drei Servos angesteuerte Taumelscheibe geordert.

Weiterhin wurde noch das Hauptgetriebe mit Freilauf und die nötige Nabe mit Innenzahnrad, die mit der Hauptrotorwelle durch Madenschrauben fest verschraubt wird, bestellt, da ich bei einer eventuellen Autorotation einen mitdrehenden Heckrotor bevorzuge. Für den Einbau des Motors werden noch der Motorträger sowie die Senk-Innensechskantschrauben M4×8 benötigt.
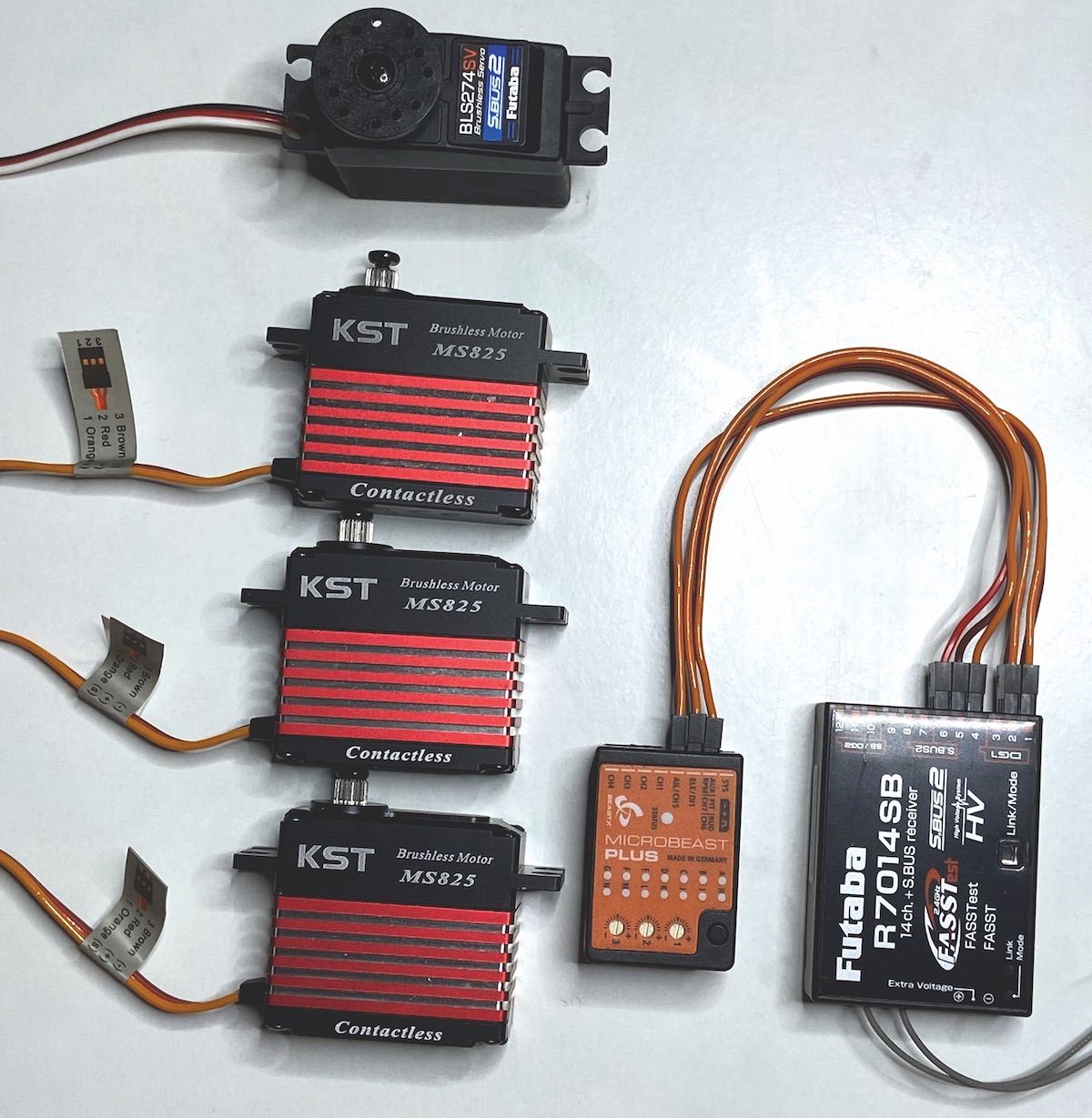
ELEKTRONISCHE KOMPONENTEN
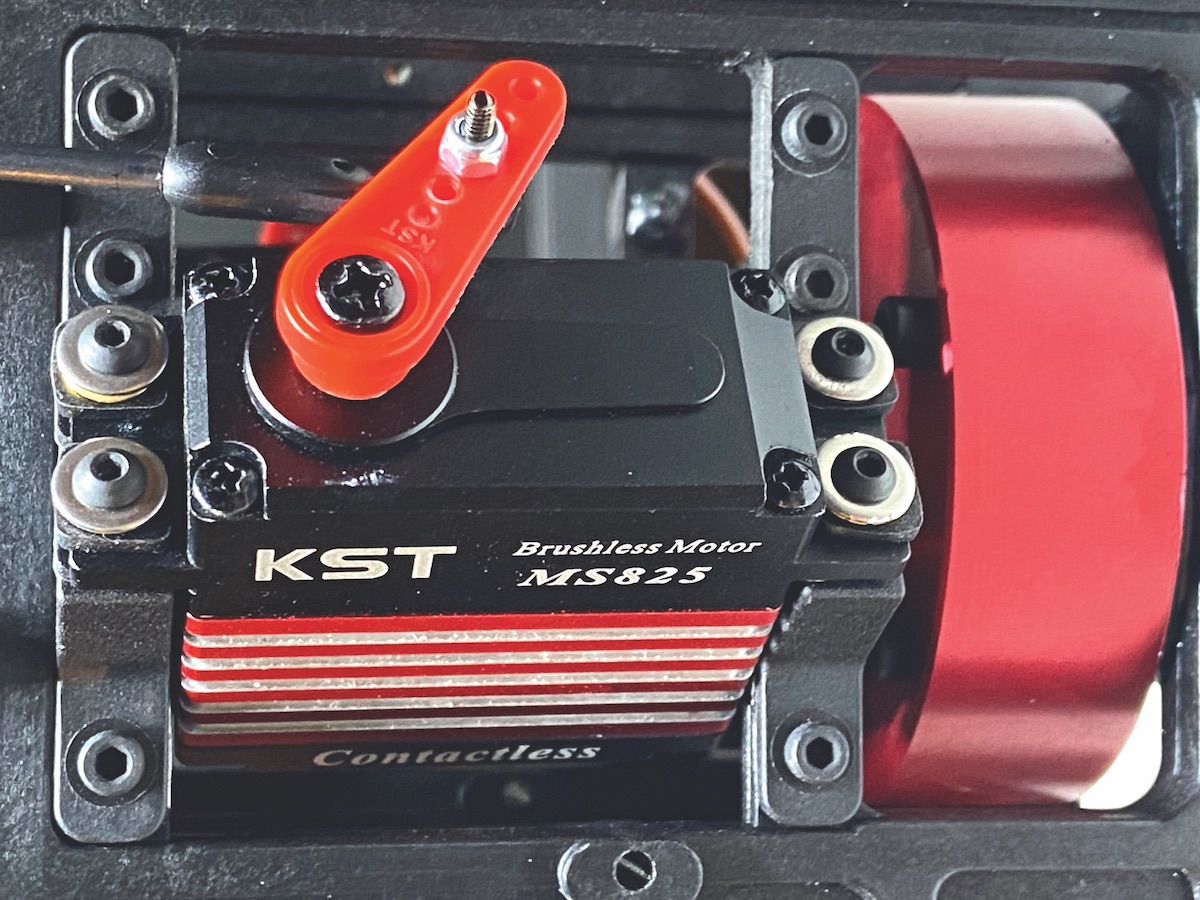
Für die Taumelscheibe werden drei KST MS825 (Bericht in ROTOR 5/2023) und für das Heck ein Futaba BLS274 SV verwendet. Diese Servos werden vom FBL-System Microbeast plus HD entsprechend angesteuert. Weiterhin wird ein Kontronik Cool Kosmik 250 HV-I für die Regelung des Brushless-Motors Egodrift 4530HS 380 KV eingesetzt.
Der Kosmik-Regler ist mit 250 A für die Anwendung im Airwolf sehr wahrscheinlich überdimensioniert, allerdings fiel die Entscheidung aufgrund der sehr guten Regeleigenschaften und dem Sanftanlauf, der speziell für Scale Modelle seinesgleichen sucht, auf diesen Reglertyp. Zudem kann der mittlere Telemetrieport des Reglers direkt mit dem S.BUS2-Port am Empfänger verbunden werden, um alle notwendigen Daten zu empfangen. Als Empfänger wird ein Futaba R7014SB verwendet, da durch die Raketenwerfer und die Beleuchtung extra freie Kanäle benötigt werden.
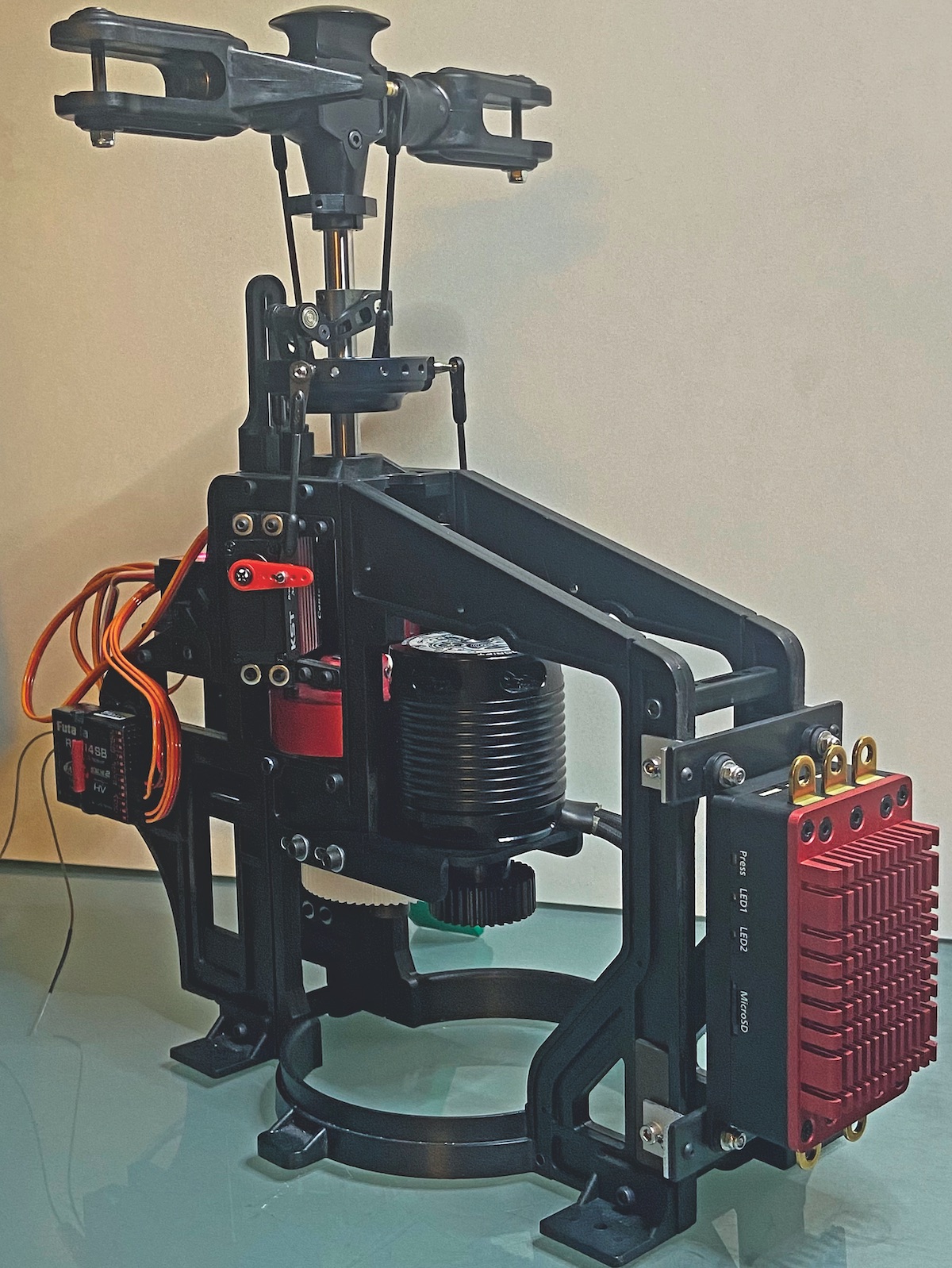
AUFBAU DER MECHANIK
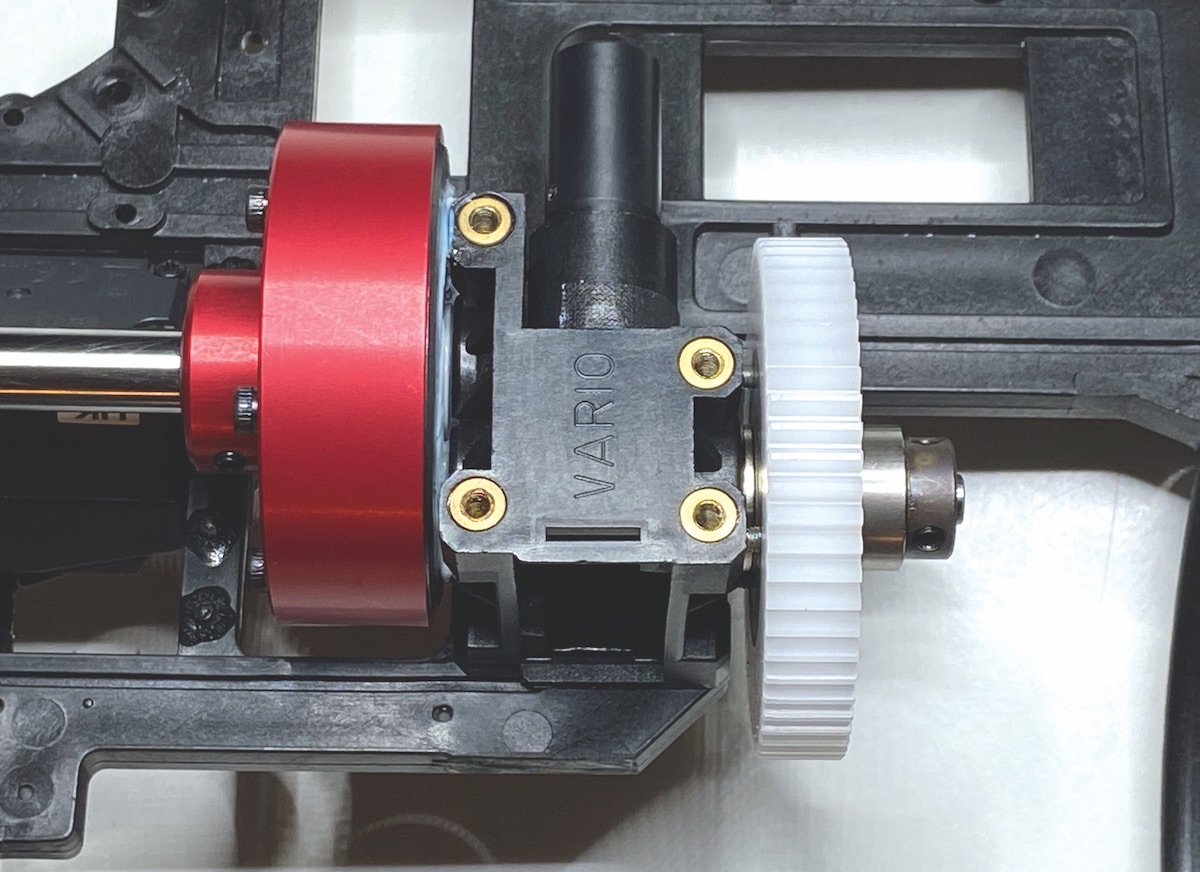
Zuerst wird das Hauptgetriebe mit Freilauf nach Anleitung montiert. Hierbei muss für den Antrieb des Heckrotors die Klauenkupplung gegen den Kardananschluss getauscht werden. Wichtig bei der Montage ist, dass das Zahnflankenspiel der Kegelzahnräder gut eingestellt ist. Hierfür werden die dem Bausatz beiliegenden Passscheiben verwendet.
Um das korrekte Zahnflankenspiel mit den Passscheiben zu erreichen, muss zwischendurch immer wieder alles montiert und in den Hauptgetriebekasten eingesetzt werden, um zu prüfen, ob die Kegelzahnräder leichtgängig zueinander laufen.
Erst wenn das Zahnflankenspiel passt, werden die Kegelzahnräder endgültig unter Verwendung der Madenschrauben und mit Loctite fest mit beiden Wellen, eins mit der Abtriebswelle zum Heckrotor und eins mit der Welle mit Ritzel, das die Nabe mit dem Innenzahnrad und somit die Hauptrotorwelle antreibt, verbunden. Anschließend können beiden Wellen mit den montierten Kegelzahnrädern und den Kugellagern in den Hauptgetriebekasten eingesetzt werden. Vor dem Verschließen mit der beiliegenden Kappe werden die Kegelzahnräder noch eingefettet. Das Hauptgetriebe ist damit fertiggestellt.
UMBAU FÜR MITDREHENDEN HECKROTOR
Bevor die Nabe mit Innenzahnrad unter Verwendung von entsprechenden Madenschrauben fest mit der Hauptrotorwelle verbunden wird, muss das Innenzahnrad, das bei diesem Nabentyp aus Kunststoff besteht, gegen das Innenzahnrad aus der dem Bausatz beiliegenden Freilaufglocke getauscht werden. Hintergrund ist, dass das Innenzahnrad aus der Freilaufglocke aus Stahl besteht und gerade beim …
⇢ Den vollständigen Bericht lesen Sie in Ausgabe 8/2023. Ausgabe bestellen.