In ROTOR 1/2023 stellten Gunther und Frederick Winkle die Koax-Mechanik von Sovereign mit Pitch-gesteuerten Rotorköpfen vor. Hierzulande ist die Mechanik über doppelrotor.eu erhältlich, die passenderweise nun auch einen Ka-26-Rumpf für die Mechanik anbietet. Helmut Kinsperger hat das Modell aufgebaut und berichtet.

Ich begann mit dem Helifliegen vor ca. zehn Jahren mit einem Koaxial-Heli mit fixem Pitch. Das Modell wies eine sehr gute Stabilität aus, war bei leichtem Wind aber nicht richtig steuerbar. Bei abruptem Steig- oder Sinkflügen berührten sich unter Umständen die obere und untere Rotorebene – das hatte meist einen Absturz zur Folge! Das war’s dann mit dem Koaxial-Heli und ich wechselte auf Modelle mit Heckrotor und steuerbarem Pitch. Außerdem nahm ich Trainingsstunden, um das Fliegen zu erlernen.

Das Thema Koaxial-Modelle beschäftigte mich immer wieder. Es gab sogar Ideen, den Fixed-Pitch-Heli mit zwei Taumelscheiben auszurüsten – es kam aber nie zur Realisierung. In der Zwischenzeit baute ich zwei Semiscale-Modelle: eine Alouette II (Bericht in ROTOR 6/2022 und eine Bell Huey UH-1N).
Im Sommer 2022 entdeckte ich in der ROTOR-Neuheiten-Rubrik den Bausatz eines Kamov KA-26 von doppelrotor.eu mit einer Koax-Mechanik von Sovereign Technologies. Nach einem Austausch mit Herrn Sebastian von Doppelrotor.de bestellte ich den Bausatz. Dieser besteht aus einem Rumpf aus tiefgezogenen PE-Teilen und diversen 3D-Druckteilen. Das vordere und hintere Fahrwerk war zu diesem Zeitpunkt nicht lieferbar. Dank eines Hinweises von Herrn Sebastian fand ich aber ein ähnliches vorderes Fahrwerk bei der Firma Pichler; für das hintere lieferte die Internetsuche ein passendes Ergebnis bei Hobby King.
Um die Höhe des Fahrwerks und die Größe der Räder zu erhalten, griff ich auf eine detaillierte Zeichnung der KA-26 aus dem Internet zurück und rechnete die Größenverhältnisse auf das Modell um.
Der Aufbau
Hilfestellung für den Bau erhält man über die
Beschreibung auf der Internetseite von doppelrotor.eu und zusätzlich über den Link-Beitrag
X-Clone (xclone.blog4ever.com). Bevor jedoch mit dem Bau des Rumpfs begonnen wird, sollte – wie in der Beschreibung hingewiesen – die Mechanik zusammengebaut, eingestellt und geflogen werden.

Der Aufbau der Mechanik ist im beiliegenden Heft in Englisch und mit detaillierten Explosionszeichnungen beschrieben. Rotorblätter, Landegestell und Heckrohr sind dem Bausatz beigelegt. Eine Beschreibung der Einstellungen ist ebenfalls auf der Webseite von doppelrotor.eu zu finden.
AUSWAHL DER ELEKTRONIK
Ich habe – wie für meine anderen Helis – einen Graupner-Empfänger GR-18 mit integriertem FBL-System vorgesehen. In diesem habe ich vorerst 11° positives und 4° negatives Pitch eingestellt. Der obere Rotor sollte über den Pitchkompensator ± 3° verstellbar sein. Im FBL-System muss die Rotordrehrichtung links (gegen den Uhrzeigersinn, Bezug zur unteren Rotorebene) eingestellt werden.

Als Motor wurde ein Align 520 MX gewählt. Die drei Taumelscheibenservo sind Align DS530M-Digitalservos, das Pitchkompensatorservo ein Align DS535M Digital-Servo und der Motorregler ein Graupner T100+ mit integrierter Telemetrie.
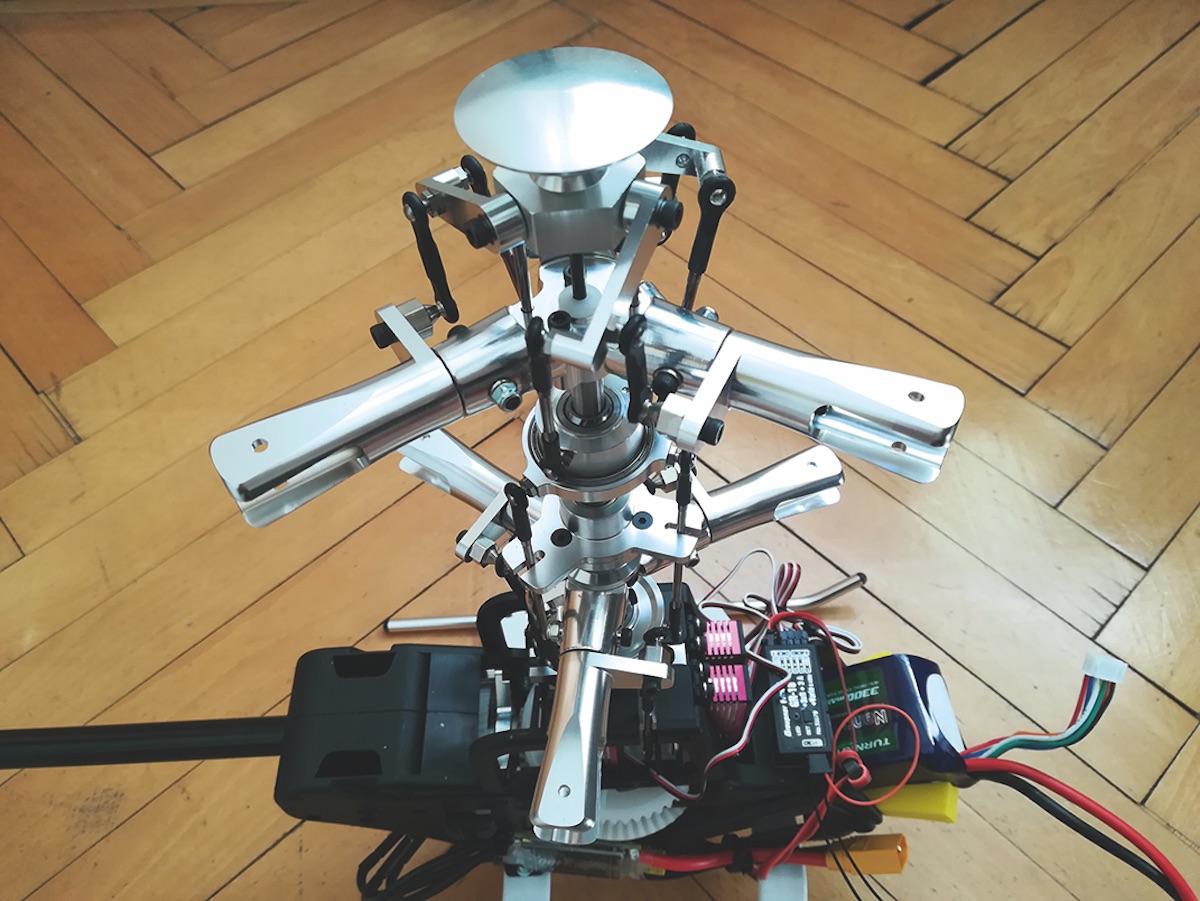
Die komplette Mechanik ist sehr solide und sauber gefertigt, erfordert jedoch etwas Geschick beim Zusammenbau. Allerdings sind bereits die …

⇢ Den vollständigen Bericht lesen Sie in Ausgabe 3/2023. Ausgabe bestellen